Netzteile
Y. SEMENOV, Rostow am Don
Radio, 2002, Nr. 5
Einen besonderen Platz in der Entwicklungsgeschichte der Leistungselektronik nehmen Schaltspannungsregler (Abwärts-, Aufwärts- und Umkehrregler) ein. Vor nicht allzu langer Zeit verfügte jedes Netzteil mit einer Ausgangsleistung von mehr als 50 Watt über einen Step-Down-Schaltregler. Heutzutage ist der Umfang solcher Geräte aufgrund der Kostensenkung bei Netzteilen mit transformatorlosem Eingang reduziert. Dennoch erweist sich der Einsatz von schaltenden Abwärtsstabilisatoren in manchen Fällen als wirtschaftlicher als alle anderen DC-DC-Wandler.
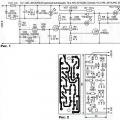
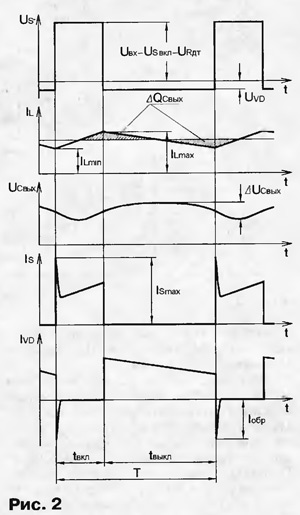
Das Funktionsdiagramm eines Abwärtsschaltreglers ist in Abb. 1 dargestellt. 1 und die Zeitdiagramme, die seinen Betrieb im Dauerstrommodus der Induktivität L, ≈ in Abb. erläutern. 2.
Zum Zeitpunkt t on ist der elektronische Schalter S geschlossen und der Strom fließt durch den Stromkreis: den Pluspol des Kondensators C in, den Widerstandsstromsensor R dt, die Speicherinduktivität L, den Kondensator C out, die Last, den Minuspol Anschluss des Kondensators C in. In diesem Stadium ist der Induktorstrom l L gleich dem Strom des elektronischen Schalters S und steigt nahezu linear von l Lmin auf l Lmax an.
Entsprechend einem Nichtübereinstimmungssignal vom Vergleichsknoten oder einem Überlastsignal von einem Stromsensor oder einer Kombination davon schaltet der Generator den elektronischen Schalter S in einen offenen Zustand. Da sich der Strom durch die Induktivität L nicht sofort ändern kann, öffnet sich unter der Wirkung der Selbstinduktions-EMF die Diode VD und der Strom l L fließt durch den Stromkreis: die Kathode der Diode VD, die Induktivität L, den Kondensator C VX, die Last, die Anode der Diode VD. Zum Zeitpunkt t lKl, wenn der elektronische Schalter S geöffnet ist, fällt der Drosselstrom l L mit dem Diodenstrom VD zusammen und nimmt linear ab
l Lmax bis l L min . Während der Periode T empfängt der Kondensator C out einen Ladungszuwachs ΔQ out und gibt ihn ab. entsprechend dem schraffierten Bereich im Zeitdiagramm des Stroms l L . Dieses Inkrement bestimmt die Amplitude der Welligkeitsspannung ΔU Cout am Kondensator Cout und an der Last.
Beim Schließen des elektronischen Schalters schließt die Diode. Dieser Vorgang geht mit einem starken Anstieg des Schalterstroms auf den Wert I smax einher, da der Widerstand des Stromkreises ≈ Stromsensor, geschlossener Schalter, Freilaufdiode ≈ sehr klein ist. Um dynamische Verluste zu reduzieren, sollten Dioden mit kurzer Sperrverzögerungszeit verwendet werden. Darüber hinaus müssen die Abwärtsreglerdioden in der Lage sein, große Sperrströme zu bewältigen. Mit der Wiederherstellung der Schließeigenschaften der Diode beginnt die nächste Umwandlungsperiode.
Wenn der schaltende Abwärtsregler bei einem niedrigen Laststrom arbeitet, kann er in den intermittierenden Induktorstrommodus wechseln. In diesem Fall stoppt der Induktorstrom in dem Moment, in dem der Schalter geschlossen wird, und sein Anstieg beginnt bei Null. Der intermittierende Strommodus ist bei einem Laststrom nahe dem Nennstrom unerwünscht, da in diesem Fall eine erhöhte Welligkeit der Ausgangsspannung auftritt. Die optimalste Situation ist, wenn der Stabilisator im Dauerstrommodus des Induktors bei maximaler Last und im intermittierenden Strommodus arbeitet, wenn die Last auf 10 ... 20 % des Nennwerts abnimmt.
Die Ausgangsspannung wird durch Änderung des Verhältnisses der Zeit des geschlossenen Zustands des Schalters zur Impulswiederholungsperiode reguliert. Dabei sind je nach Schaltungsanordnung verschiedene Möglichkeiten zur Umsetzung des Steuerverfahrens möglich. Bei Geräten mit Relaissteuerung bestimmt der Übergang vom eingeschalteten Zustand zum ausgeschalteten Zustand den Vergleichsknoten. Wenn die Ausgangsspannung größer als der eingestellte Wert ist, wird der Schalter ausgeschaltet und umgekehrt. Wenn Sie die Impulswiederholungsperiode festlegen, kann die Ausgangsspannung durch Ändern der Dauer des eingeschalteten Zustands des Schalters angepasst werden. Manchmal werden Methoden verwendet, bei denen entweder der Zeitpunkt des geschlossenen oder der Zeitpunkt des geöffneten Zustands des Schalters fest vorgegeben ist. Bei allen Steuerungsmethoden ist es zum Schutz vor Ausgangsüberlastung erforderlich, den Induktorstrom im geschlossenen Zustand des Schalters zu begrenzen. Zu diesem Zweck wird ein Widerstandssensor oder ein Impulsstromwandler verwendet.
Berechnung eines schaltenden Tiefsetzstellers
Die Auswahl der Hauptelemente eines gepulsten Abwärtsstabilisators und die Berechnung ihrer Modi wird anhand eines konkreten Beispiels durchgeführt. Alle dabei verwendeten Kennzahlen werden auf Basis der Analyse des Funktionsdiagramms und der Zeitdiagramme ermittelt und der Methodik zugrunde gelegt.
1. Basierend auf einem Vergleich der Anfangsparameter und der maximal zulässigen Strom- und Spannungswerte mehrerer leistungsstarker Transistoren und Dioden wählen wir zunächst einen bipolaren Verbundtransistor KT853G (elektronischer Schalter S) und eine Diode KD2997V (VD) aus ).
2. Berechnen Sie den minimalen und maximalen Füllfaktor:
γ min = t und min / T min = (U VyX + U pr) / (U BX max + U s on ≈ U RdT + U pr) = (12 + 0,8) / (32-2-0,3 + 0,8)=0,42;
γ max \u003d t und max / T max \u003d (U Bvyx + U pp) / (U Bx min - U sbkl -U Rdt + U pp) \u003d (12 + 0,8) / (18-2-0,3 + 0,8 )=0,78, wobei U pr =0,8 V ≈ direkter Spannungsabfall an der Diode VD, erhalten aus dem direkten Zweig der I-V-Kennlinie für einen Strom gleich I V im ungünstigsten Fall; U sbcl \u003d 2 V ≈ Sättigungsspannung des KT853G-Transistors, der als Schalter S fungiert, mit einem Stromübertragungskoeffizienten im Sättigungsmodus h 21e \u003d 250; U RdT = 0,3 V ≈ Spannungsabfall am Stromsensor bei Nennlaststrom.
3. Wählen Sie die maximale und minimale Konvertierungshäufigkeit aus.
Dieses Element wird ausgeführt, wenn die Impulsperiode nicht konstant ist. Wir wählen eine Steuerungsmethode mit einer festen Dauer des offenen Zustands des elektronischen Schalters. In diesem Fall ist die folgende Bedingung erfüllt: t=(1 – γ max)/f min = (1 – γ min)/f max =const.
Da die Umschaltung auf den KT853G-Transistor erfolgt, der schlechte dynamische Eigenschaften aufweist, werden wir die maximale Konvertierungsfrequenz relativ niedrig wählen: f max =25 kHz. Dann kann die minimale Konvertierungshäufigkeit definiert werden als
f min \u003d f max (1 - γ max) / (1 - γ min) \u003d 25 * 10 3 ] (1 - 0,78) / (1-0,42) \u003d 9,48 kHz.
4. Berechnen Sie die Verlustleistung am Schalter.
Statische Verluste werden durch den Effektivwert des durch den Schalter fließenden Stroms bestimmt. Da die Stromform ≈ trapezförmig ist, gilt I s = I out, wobei α = l Lmax / l lx = 1,25 ≈ das Verhältnis des maximalen Induktorstroms zum Ausgangsstrom ist. Der Koeffizient a wird innerhalb von 1,2 ... 1,6 gewählt. Statische Schalterverluste P Sstat =l s U SBKn =3,27-2=6,54 W.
Dynamische Verluste am Schalter Р sdyn ╥0,5f max ╥U BX max (l smax ╥t f +α╥l lx ╥t cn),
wobei I smax ≈ die Schaltstromamplitude aufgrund der Sperrverzögerung der VD-Diode ist. Wenn wir l Smax =2l ByX nehmen, erhalten wir
R sdin = 0,5f max ╥U BX max ╥I out (2t f + α∙ t cn) = 0,5╥ 25╥10 3 ╥32╥5 (2╥0,78-10 -6 +1,25 -2-10 - 6)=8,12 W, wobei t f =0,78╥10 -6 s ≈ die Dauer der Vorderseite des Stromimpulses durch den Schalter, t cn =2╥10 -6 s ≈ die Dauer des Abfalls.
Die Gesamtverluste am Schalter betragen: P s = P scstat + P sdin = 6,54 + 8,12 = 14,66 W.
Wenn am Schalter statische Verluste vorherrschten, sollte die Berechnung für die minimale Eingangsspannung bei maximalem Induktorstrom durchgeführt werden. Wenn es schwierig ist, die vorherrschende Art der Verluste vorherzusagen, werden diese sowohl bei der minimalen als auch bei der maximalen Eingangsspannung ermittelt.
5. Wir berechnen die Verlustleistung der Diode.
Da die Form des Stroms durch die Diode ≈ ebenfalls trapezförmig ist, definieren wir seinen Effektivwert als Statische Verluste an der Diode P vDcTaT = l vD ╥U pr = 3,84-0,8 = 3,07 W.
Die dynamischen Verluste der Diode sind hauptsächlich auf Verluste während der Sperrwiederherstellung zurückzuführen: P VDdyn \u003d 0,5f max ╥
l smax vU Bx max ╥t oB ╥f max ╥l Bыx ╥U in max ╥t ov ╥25-10 3 -5-32╥0,2╥10 -6 =0,8 W, wobei t OB =0, 2-1C - 6 s ≈ Sperrverzögerungszeit der Diode.
Die Gesamtverluste der Diode betragen: P VD = P MDstat + P VDdin = 3,07 + 0,8 = 3,87 W.
6. Wählen Sie einen Kühlkörper.
Das Hauptmerkmal eines Kühlkörpers ist sein Wärmewiderstand, der als Verhältnis zwischen der Temperaturdifferenz zwischen der Umgebung und der Kühlkörperoberfläche und der von ihm abgegebenen Leistung definiert ist: R g = ΔT / P rass. In unserem Fall ist es notwendig, den Schalttransistor und die Diode durch isolierende Abstandshalter auf demselben Kühlkörper zu befestigen. Um den Wärmewiderstand der Dichtungen nicht zu berücksichtigen und die Berechnung nicht zu erschweren, wählen wir eine niedrige Oberflächentemperatur von etwa 70 Grad. C. Dann bei Umgebungstemperatur 40╟СΔТ=70-40=30╟С. Der Wärmewiderstand des Kühlkörpers für unseren Fall R t = ΔT / (P s + P vd) = 30 / (14,66 + 3,87) = 1,62╟С / W.
Der Wärmewiderstand bei natürlicher Kühlung ist in der Regel in den Referenzdaten des Kühlkörpers angegeben. Um die Größe und das Gewicht des Geräts zu reduzieren, können Sie eine Zwangskühlung mit einem Lüfter anwenden.
7. Berechnen Sie die Drosselklappenparameter.
Berechnen wir die Induktivität des Induktors: L= (U BX max - U sbkl -U Rdt - U Out)γ min /=(32-2-0,3-12)╥0,42/=118,94 μH.
Als Material des Magnetkerns wählen wir gepresstes Mo-Permalloy MP 140. Der variable Anteil des Magnetfeldes im Magnetkreis ist in unserem Fall so bemessen, dass Hystereseverluste kein limitierender Faktor sind. Daher kann die maximale Induktion auf dem linearen Abschnitt der Magnetisierungskurve nahe dem Wendepunkt gewählt werden. Arbeiten an einem gekrümmten Abschnitt sind unerwünscht, da in diesem Fall die magnetische Permeabilität des Materials geringer ist als die ursprüngliche. Dies wiederum führt dazu, dass die Induktivität mit zunehmendem Induktorstrom abnimmt. Wir wählen die maximale Induktion B m gleich 0,5 T und berechnen das Volumen des Magnetkreises: Vp \u003d μμ 0 ╥L (αI outx) 2 / B m 2 \u003d 140 ╥ 4π ╥ 10 -7 ╥ 118,94 ╥ 10 - 6 (1,25 -5) 2 0,5 2 \u003d 3,27 cm 3, wobei μ \u003d 140 ≈ anfängliche magnetische Permeabilität des MP140-Materials; μ 0 =4π╥10 -7 H/m ≈ magnetische Konstante.
Entsprechend dem berechneten Volumen wählen wir den Magnetkreis aus. Aufgrund der Konstruktionsmerkmale besteht der MP140-Permalloy-Magnetkreis normalerweise aus zwei gefalteten Ringen. In unserem Fall sind Ringe KP24x13x7 geeignet. Die Querschnittsfläche des Magnetkreises Sc=20,352 =0,7 cm 2 und die durchschnittliche Länge der Magnetlinie λс=5,48 cm. Das Volumen des ausgewählten Magnetkreises beträgt: VC=SC╥ λс=0,7╥5,48 =3,86 cm 3 >VP.
Wir berechnen die Anzahl der Windungen: Wir nehmen die Anzahl der Windungen gleich 23.
Wir bestimmen den Durchmesser des Drahtes mit Isolierung auf der Grundlage der Tatsache, dass die Wicklung in einer Schicht Windung für Windung entlang des Innenumfangs des Magnetkreises passen muss: wobei d K \u003d 13 mm ≈ der Innendurchmesser des Magnetkreises ist; k 3 \u003d 0,8 ≈ Füllfaktor des Magnetkreisfensters mit einer Wicklung.
Wir wählen den Draht PETV-2 mit einem Durchmesser von 1,32 mm.
Vor dem Aufwickeln des Drahtes sollte der Magnetkern mit einer 20 µm dicken und 6...7 mm breiten PET-E-Folie einlagig isoliert werden.
8. Berechnen Sie die Kapazität des Ausgangskondensators: C Bvyx \u003d (U BX max -U sBcl - U Rdt) ╥γ min /= (32-2-0,3) 0,42 / \u003d 1250 μF, wobei ΔU Сvyx \u003d 0 , 01 V ≈ Spitze-Spitze-Welligkeit am Ausgangskondensator.
Die obige Formel berücksichtigt nicht den Einfluss des internen Serienwiderstands des Kondensators auf die Welligkeit. Vor diesem Hintergrund und unter Berücksichtigung einer Toleranz von 20 % für die Kapazität von Oxidkondensatoren wählen wir zwei K50-35-Kondensatoren für eine Nennspannung von 40 V mit einer Kapazität von jeweils 1000 Mikrofarad aus. Die Wahl von Kondensatoren mit einer überschätzten Nennspannung ist darauf zurückzuführen, dass mit zunehmendem Wert dieses Parameters der Serienwiderstand der Kondensatoren abnimmt.
Das gemäß den im Zuge der Berechnung erhaltenen Ergebnissen entwickelte Schema ist in Abb. 1 dargestellt. 3.
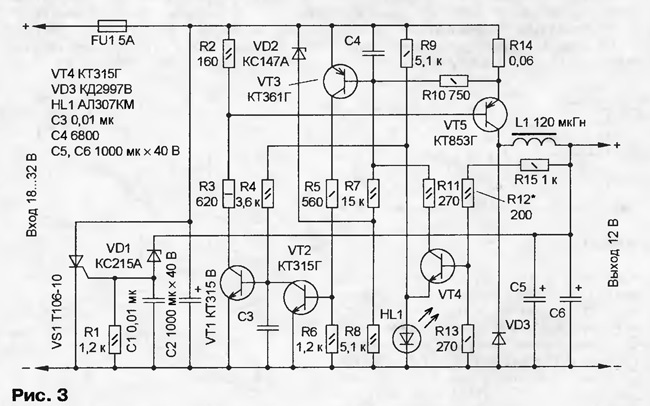
Betrachten wir den Stabilisator genauer. Im geöffneten Zustand des elektronischen Schalters ≈ Transistor VT5 ≈ entsteht am Widerstand R14 (Stromsensor) eine Sägezahnspannung. Wenn er einen bestimmten Wert erreicht, öffnet der Transistor VT3, der wiederum den Transistor VT2 öffnet und den Kondensator C3 entlädt. In diesem Fall schließen die Transistoren VT1 und VT5 und die Schaltdiode VD3 öffnet ebenfalls. Die zuvor offenen Transistoren VT3 und VT2 werden geschlossen, aber der Transistor VT1 öffnet erst, wenn die Spannung am Kondensator C3 einen Schwellenwert erreicht, der seiner Öffnungsspannung entspricht. Dadurch entsteht ein Zeitintervall, in dem der Schalttransistor VT5 geschlossen ist (ca. 30 µs). Am Ende dieses Intervalls öffnen die Transistoren VT1 und VT5 und der Vorgang wiederholt sich erneut.
Widerstand R. 10 und Kondensator C4 bilden einen Filter, der den Spannungsstoß an der Basis des Transistors VT3 aufgrund der Sperrverzögerung der Diode VD3 unterdrückt.
Für den Siliziumtransistor VT3 beträgt die Basis-Emitter-Spannung, bei der er in den aktiven Modus wechselt, etwa 0,6 V. In diesem Fall wird relativ viel Leistung am Stromsensor R14 verbraucht. Um die Spannung am Stromsensor zu reduzieren, bei der der Transistor VT3 öffnet, wird entlang der VD2R7R8R10-Schaltung eine konstante Vorspannung von etwa 0,2 V an seine Basis angelegt.
Der Basis des Transistors VT4 wird von einem Teiler eine zur Ausgangsspannung proportionale Spannung zugeführt, dessen oberer Arm aus den Widerständen R15, R12 besteht und dessen unterer Arm ≈ Widerstand R13 ist. Die HL1R9-Schaltung erzeugt eine Referenzspannung, die der Summe des Gleichspannungsabfalls über der LED und dem Emitterübergang des Transistors VT4 entspricht. In unserem Fall beträgt die beispielhafte Spannung 2,2 V. Das Fehlanpassungssignal ist gleich der Differenz zwischen der Spannung an der Basis des VT4-Transistors und der beispielhaften Spannung.
Die Ausgangsspannung wird durch die Summation des vom Transistor VT4 verstärkten Fehlanpassungssignals mit der Spannung basierend auf dem Transistor VT3 stabilisiert. Gehen Sie davon aus, dass die Ausgangsspannung gestiegen ist. Dann wird die Spannung an der Basis des Transistors VT4 vorbildlicher. Der Transistor VT4 öffnet leicht und verschiebt die Spannung an der Basis des Transistors VT3, sodass dieser ebenfalls zu öffnen beginnt. Folglich öffnet der Transistor VT3 bei einem niedrigeren Pegel der Sägezahnspannung am Widerstand R14, was zu einer Verkürzung des Zeitintervalls führt, in dem der Schalttransistor geöffnet ist. Die Ausgangsspannung wird dann sinken.
Sinkt die Ausgangsspannung, verläuft der Regelungsvorgang ähnlich, erfolgt jedoch in umgekehrter Reihenfolge und führt zu einer Verlängerung der Öffnungszeit des Schalters. Da der Strom des Widerstands R14 direkt an der Bildung der Offenzeit des Transistors VT5 beteiligt ist, gibt es hier zusätzlich zur üblichen Ausgangsspannungsrückkopplung eine Stromrückkopplung. Dadurch können Sie die Ausgangsspannung ohne Last stabilisieren und schnell auf eine plötzliche Stromänderung am Ausgang des Geräts reagieren.
Bei einem Lastkurzschluss oder einer Überlastung schaltet der Stabilisator in den Strombegrenzungsmodus. Bei einem Strom von 5,5 ... 6 A beginnt die Ausgangsspannung zu sinken und der Schließstrom beträgt etwa 8 A. In diesen Modi wird die Einschaltzeit des Schalttransistors auf ein Minimum reduziert, was die Leistung reduziert darauf verstreut.
Wenn der Stabilisator aufgrund des Ausfalls eines der Elemente (z. B. Durchbruch des Transistors VT5) nicht richtig funktioniert, steigt die Spannung am Ausgang. In diesem Fall kann der Ladevorgang fehlschlagen. Um Notsituationen vorzubeugen, ist der Wandler mit einer Schutzeinheit ausgestattet, die aus einem Trinistor VS1, einer Zenerdiode VD1, einem Widerstand R1 und einem Kondensator C1 besteht. Wenn die Ausgangsspannung die Stabilisierungsspannung der Zenerdiode VD1 überschreitet, beginnt ein Strom durch sie zu fließen, der den Trinistor VS1 einschaltet. Sein Einschluss führt zu einem Abfall der Ausgangsspannung auf nahezu Null und zum Durchbrennen der Sicherung FU1.
Das Gerät ist für die Versorgung von 12-Volt-Audiogeräten, die hauptsächlich für Personenkraftwagen bestimmt sind, aus dem Bordnetz von Lastkraftwagen und Bussen mit einer Spannung von 24 V ausgelegt. Dies liegt daran, dass die Eingangsspannung in diesem Fall eine geringe Welligkeit aufweist Der Kondensator C2 hat eine relativ kleine Kapazität. Es reicht nicht aus, wenn der Stabilisator direkt vom Netztransformator mit Gleichrichter gespeist wird. In diesem Fall sollte der Gleichrichter mit einem Kondensator mit einer Kapazität von mindestens 2200 Mikrofarad für die entsprechende Spannung ausgestattet sein. Der Transformator muss eine Gesamtleistung von 80 ... 100 W haben.
Der Stabilisator verwendet Oxidkondensatoren K50-35 (C2, C5, C6). Kondensator SZ ≈ Folie K73-9, K73-17 usw. geeigneter Größe, C4 ≈ Keramik mit geringer Selbstinduktivität, zum Beispiel K10-176. Alle Widerstände, außer R14, ≈ C2-23 der entsprechenden Leistung. Der Widerstand R14 besteht aus einem 60 mm langen Stück PEC 0,8-Konstantandraht mit einem linearen Widerstand von ca. 1 Ohm/m.
Eine Zeichnung einer Leiterplatte aus einseitig folienbeschichtetem Fiberglas ist in Abb. 1 dargestellt. 4.
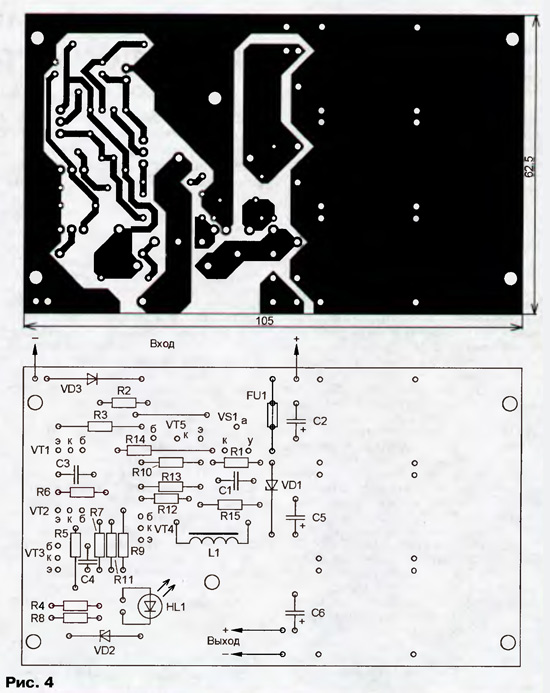
Diode VD3, Transistor VD5 und Trinistor VS1 sind über eine isolierende wärmeleitende Dichtung mit Kunststoffbuchsen am Kühlkörper befestigt. Auch die Platine ist auf demselben Kühlkörper befestigt.
Das Aussehen des zusammengebauten Geräts ist in Abb. dargestellt. 5.
LITERATUR
1. Titze W., Shenk K. Halbleiterschaltungen: Ein Referenzhandbuch. Pro. mit ihm. ≈ M.: Mir, 1982.
2. Halbleiterbauelemente. Transistoren mittlerer und hoher Leistung: ein Handbuch / A. A. Zaitsev, A. I. Mirkin, V. V. Mo-kryakov usw. Ed. A. V. Golomedova. ≈ M.: Radio und Kommunikation, 1989.
3. Halbleiterbauelemente. Gleichrichterdioden, Zenerdioden, Thyristoren: Handbuch / A. B. Gitsevich, A. A. Zaitsev, V. V. Mokryakov usw. Ed. A. V. Golomedova. ≈ M.: Radio und Kommunikation, 1988.